Overview
This Multi-Tool Adapter offers a streamlined way to mount an ISO-50 end-of-arm tool to an ISO-50 robot flange, while also supporting additional attachments on its side faces via M6 threaded holes. It maintains alignment between the robot arm and the tool without creating any clocking angle difference. Please note, this Adapter introduces a 30 mm Z-axis offset to the Tool Center Point (TCP).
Installation
Robot side step-by-step instructions
To install this, you will need a 4mm hex key or t-handle.
Step 1
Insert the four included M6 bolts into the robot’s ISO-50 mounting pattern. Once the bolt heads engage with the threads, tighten each approximately two full turns.
.png)
Step 2
Insert the pin into the female side of the ISO-50 pattern on the Multi-Tool Adapter.
.png)
Step 3
Align the large openings of the keyhole slots with the bolt heads, then slide the Adapter with the robot arm flange.
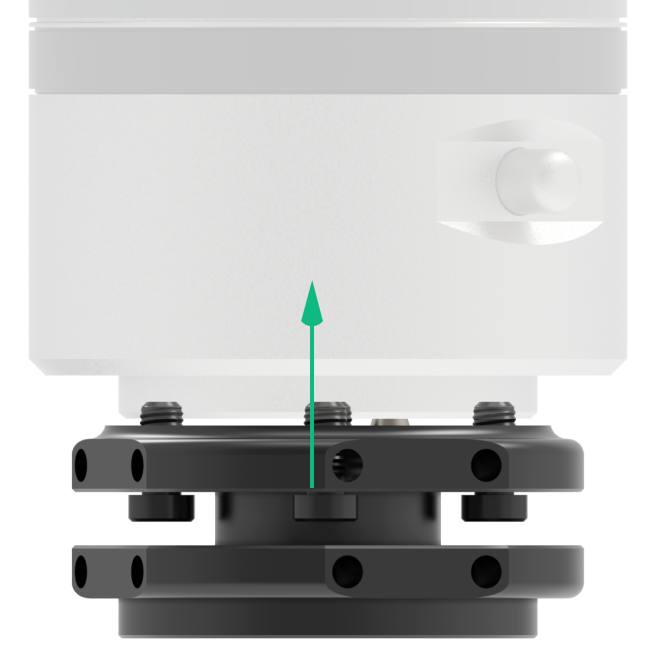
Step 4
Rotate the Adapter counter clock wise and then push it so that the pin inserted in step 1 slides into it’s receiving feature on the robot side.

Step 5
Slide the 4mm hex drive Allen Key or T-Handle through the bottom M6 threaded holes to tighten the M6 bolts to fully constrain the Adapter. Refer to the robot’s manual for the specified torque values.
.png)
Step 6
Attach the end of arm tool to the Adapter. Follow the instructions provided by the end of arm tool’s manufacturer. Torque the M6 bolts to 9Nm.
Attachments side step-by-step instructions
Step 1
Bolt the attachment to the side faces. Tighten M6 bolts to 9 Nm.