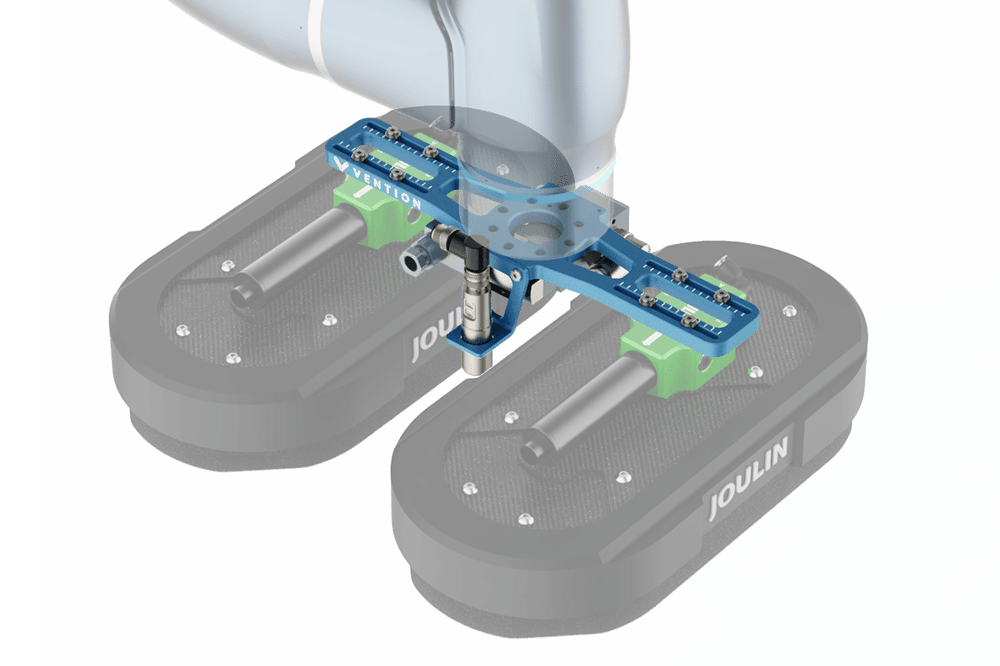
Dual Joulin Safe & Light Cobot Gripper
The Dual Joulin Safe & Light Cobot Gripper is a plug-and-play solution allowing the user to integrate two 120x240mm or 160x320mm Safe & Light grippers directly to your cobot end-of-arm. This solution is a great choice for medium to large sized boxes where the larger gripping surface area can help improve payload stability to maintain a high box throughput.
|
Technical Specifications
Available payload: Up to 22 kg*
Airflow requirement: 14 SCFM
Inlet tubing diameter: 12 mm
Available gripper adjustment: 40 mm
Cobot mounting pattern: ISO 9409-1-50-4-M6
Box detection: PNP diffuse sensor
*Based on 25 kg capacity of Doosan 2515
|
Assembly Instructions
Assembling the dual gripper is quite an easy process but is facilitated if the cobot TCP is parallel to the ground, at a comfortable working height and the adaptor bracket is first mounted to the cobot. For this assembly the Doosan H-series will be used as reference for adaptor orientation.
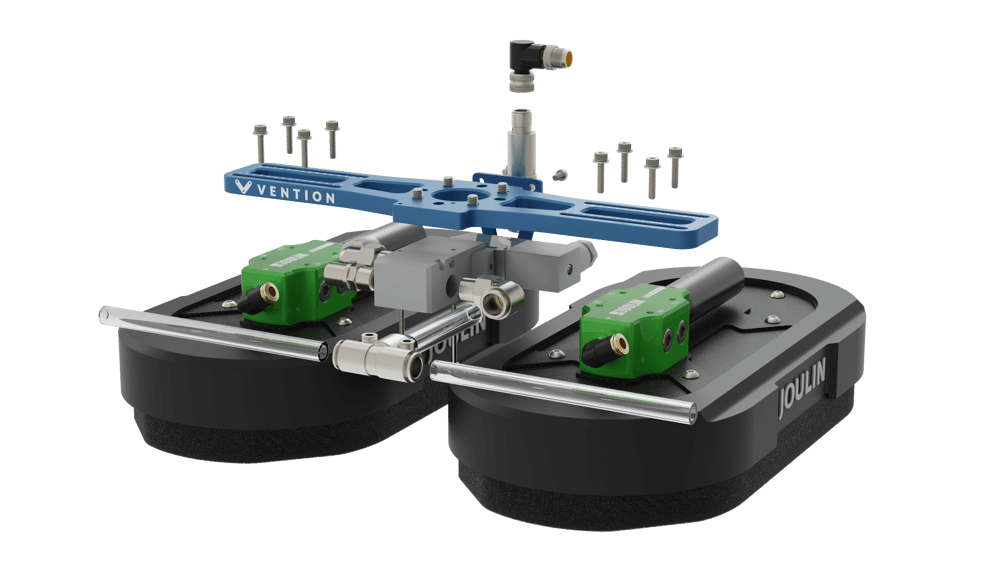
The assembly will come packaged with the solenoid valve attached to the dual gripper plate. To gain access to the cobot mounting flange, remove the 2 M3x35 bolts using a 2.5mm allen key.
Attach the dual gripper plate to the cobot with the provided 4 M6x10 bolts and 6mm diameter dowel pin. Ensure the sensor bracket side is positioned opposing the “X1” connector orientation.
Re-secure the solenoid valve to the plate in the same manner it was disassembled. Do not over-tighten the bolts.
Attach the diffuse PNP pick detection sensor to the sensor bracket using the provided M18 nuts and lock washers, using one of each on either side of the sensor bracket. Secure the sensor roughly mid-height. Install the M12 Right-Angle connector atop the sensor and screw the M12 straight connector from the harness into it.
Plug the M8 connector into the robot TCP via the “X1” port.
Attach the gripper to the plate using 4 M4x18 bolts and washers while ensuring the long offset of the gripper is on the pick detection sensor side. Locate the gripper with the reference markings and repeat for the other gripper.
Plug the 10mm pneumatic lines into the gripper. Rotate the right-angle fittings on the grippers to face away from the TCP for packaging.
Install the 12mm spiral supply line to the solenoid valve, and to that, connect the 12mm tubing via the one-touch inline connector.
Strain-relieve and secure the harness in a way so as not to have it become entangled in the pneumatic tubing.