|
Overview
A Robot Safety Module (no MachineMotion) CE-SA-016-0002 is used when there is a need for a heads up signal to place Cobot in collaborative mode or when our Safety Module features are considered for an application (muting, mode-switching or auto-reset). The Safety IN port and the Reduced port are connected to safety modules which change the state of the robot.
This document covers requirements for latest version of Vention’s Robot Safety Module. For previous version, refer to link below:
Features
Configuration-free: plug & play
Robot Safety Modules can be daisy-chained
Support robot reduced/collaborative mode
Compatible with most robot brands
Five port Ethernet switch (safety IN, safety OUT, reduced, to robot, internal mcu)
On-board LED for power, fuse, and communication status indication, located on the bottom of the module
LED indicator displaying power status, fault alerts, safety status, and activation of an emergency stop triggered by the module
Included cables
1x Safety Extension cable - CE-CA-102-5001__3
1x Robot Safety Module “TO ROBOT” cable - CE-SA-111-2550__2
1x MachineMotion 2 Safety IN Pigtail cable - CE-CA-105-2000__2
1x Safety Jumper - CE-SA-102-0001
Safety
.png)
Vention’s safety modules perform safety functions as a part of a whole installation or machine. A complete safety system normally includes sensors or input units, logic units and contactors or output units. The manufacturer of the installation or machine is responsible for ensuring proper functioning of the whole system. The total concept of the control system into which the safety module is integrated must be validated by the user. Vention cannot guarantee all specifications of an installation or a machine without being responsible for the risk assessment and the design of the safety system. Vention takes over no liability for recommendations which are given or implied in the following description.
The following items must be taken into consideration during the design, risk assessment & installation of the safety system :
The Safety Modules shall be put into operation only after the safety functions have been tested during the commissioning.
According to EN IEC 60204-1:2018 and EN ISO 10218-1:2011 it is not allowed to restart automatically after emergency stop. Therefore the control systems of the connected devices have to disable the automatic start after emergency stop.
Opening the Safety Module or implementing unauthorized changes voids any warranty.
.png)
Functional error! Danger to life, risk of serious injuries or property damage
The Robot Safety Module may only be used in VENTION safety ecosystem;
The Robot Safety Module shall be connected to a robot according to its specific wiring diagram.
No emergency stop button shall be connected to the Safety IN port;
No emergency stop button shall be connected to the safety chain of the Reduced port;
The Robot Safety Module does not monitor the input redundant signals at the From Robot port. If the connected devices do not have monitoring of its output signals, the performance level of the safety function can be reduced;
If the robot is placed in reduced (collaborative mode) with a cycle time of less than 500s, the performance level may drop to PL d.
The Robot Safety Module is designed to operate in indoor environments without dust or high humidity. Dust and dampness may lead to malfunction. Do not install or operate the Safety Module outdoors;
Technical specs
General Specifications
Item | Specification |
|---|---|
Part Number | |
Weight | 0.8kg |
Dimensions | 19.0 x 15.0 x 9.0mm |
Material |
|
Operating Temp | 0 to 40°C |
IP rating (IEC 60529) | IP54 |
Electrical Specifications
Item | Specification |
|---|---|
Nominal input voltage | 24 VDC (Class 2 or SELV power supply* |
Input voltage range | 19.2 ~ 26.4 VDC |
Operating power consumption | 5 W without robot connected |
Short circuit protection | Internal E-FUSE IC |
Max current allowed | 2.5 A |
Note: In North America the Safety Module shall be supplied by a certified class 2 power supply. In Europe, the Safety Module must be supplied by an SELV circuit. When powered by the MachineMotion those requirements are met.
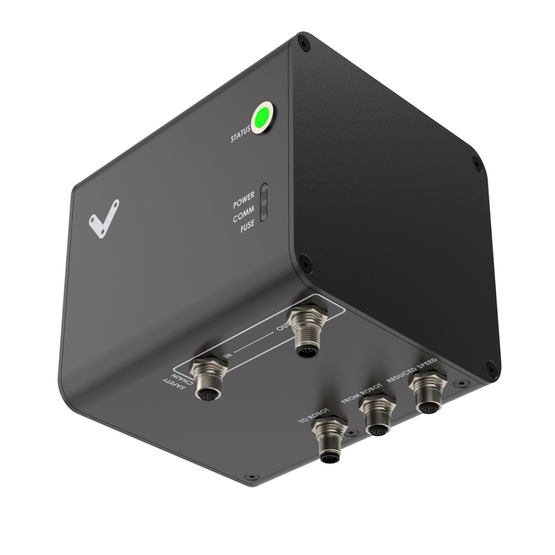
Physical Interface
 Figure 1: Physical Interface |
LED Indicators
Name | LED Color | Indicated (when ON) |
|---|---|---|
POWER | White | 24 VDC supplied to module |
COMM | White | Ethernet communication functional |
FUSE | Red | Module internal fuse tripped |
STATUS | Off | Disconnected |
STATUS | Green | Connected |
STATUS | Orange | Error |
STATUS | Red | E-Stop |
STATUS | Blinking Red | User triggered E-Stop |
STATUS | Blinking Blue | Reduced/Collaborative mode |
Functionality
The Robot Safety Module (No MachineMotion) is used when the robot needs to go at a slower speed or other safety functions such as force limitation needs to be enabled and the robot controller is no able support detection devices (Light curtain, Area scanners …) utilizing OSSD signals.
No estop+reset module (CE-SA-007-0001) can be plugged into the reduced speed port.
Port definitions
|

Safety OUT - Pin-out - M12, male, 12-pin, A-Keyed
The Safety OUT port connects to the robot controller.
Pin | Function |
|---|---|
Pin 1 | NC |
Pin 2 | NC |
Pin 3 | Heads up 11 |
Pin 4 | Heads up 12 |
Pin 5 | NC |
Pin 6 | NC |
Pin 7 | NC |
Pin 8 | NC |
Pin 9 | NC |
Pin 10 | NC |
Pin 11 | NC |
Pin 12 | NC |
Safety IN - Pin-out - M12, female, 12-pin, A-Keyed
The Safety IN port connects to the SAFETY OUT port of another Safety Module (if daisy-chaining multiple safety modules) or to an E-Stop and Reset Module (CE-SA-007-0000). IMPORTANT: If the SAFETY IN port is not used, insert the included yellow jumper.
Pin | Function |
|---|---|
Pin 1 | 24 VDC |
Pin 2 | 0V |
Pin 3 | OSSD 1A |
Pin 4 | OSSD 2A |
Pin 5 | OSSD 1B |
Pin 6 | OSSD 1B |
Pin 7 | RESET |
Pin 8 | NC |
Pin 9 | ETHERNET TX+ (auto-MDIX) |
Pin 10 | ETHERNET TX- (auto-MDIX) |
Pin 11 | ETHERNET RX+ (auto-MDIX) |
Pin 12 | ETHERNET RX- (auto-MDIX) |
To Robot - Pin-out - M12, male, 12-pin, A-Keyed
Pin | Function |
|---|---|
Pin 1 | NC |
Pin 2 | NC |
Pin 3 | STO_TO_ROBOT 11 |
Pin 4 | STO_TO_ROBOT 12 |
Pin 5 | STO_TO_ROBOT 21 |
Pin 6 | STO_TO_ROBOT 22 |
Pin 7 | NC |
Pin 8 | RESET |
Pin 9 | ETHERNET TX+ (auto-MDIX) |
Pin 10 | ETHERNET TX- (auto-MDIX) |
Pin 11 | ETHERNET RX+ (auto-MDIX) |
Pin 12 | ETHERNET RX- (auto-MDIX) |
From Robot - Pin-out - M12, female, 12-pin, A-Keyed
Pin | Function |
|---|---|
Pin 1 | STO_IN (24V) |
Pin 2 | STO_IN (24V) |
Pin 3 | NC |
Pin 4 | NC |
Pin 5 | 0V |
Pin 6 | REDUCED OUT 11 |
Pin 7 | REDUCED OUT 12 |
Pin 8 | REDUCED OUT 21 |
Pin 9 | REDUCED OUT 22 |
Pin 10 | NC |
Pin 11 | NC |
Pin 12 | NC |
Reduced - Pin-out - M12, female, 12-pin, A-Keyed
Pin | Function |
|---|---|
Pin 1 | 24V (fused) |
Pin 2 | 0V |
Pin 3 | OSSD A |
Pin 4 | 24 VDC |
Pin 5 | OSSD B |
Pin 6 | 24 VDC |
Pin 7 | RESET |
Pin 8 | 0V |
Pin 9 | ETHERNET TX+ (auto-MDIX) |
Pin 10 | ETHERNET TX- (auto-MDIX) |
Pin 11 | ETHERNET RX+ (auto-MDIX) |
Pin 12 | ETHERNET RX- (auto-MDIX) |
Mounting
Install the module mounting bracket (CE-HW-005-1002) to the extrusion with the screws provided (HW-FN-003-0018). Install the module onto the mounting bracket as illustrated below.
.png) Figure 3: Module Mounting | .png) Figure 3: Module Mounting |
Wiring Diagram without MachineMotion
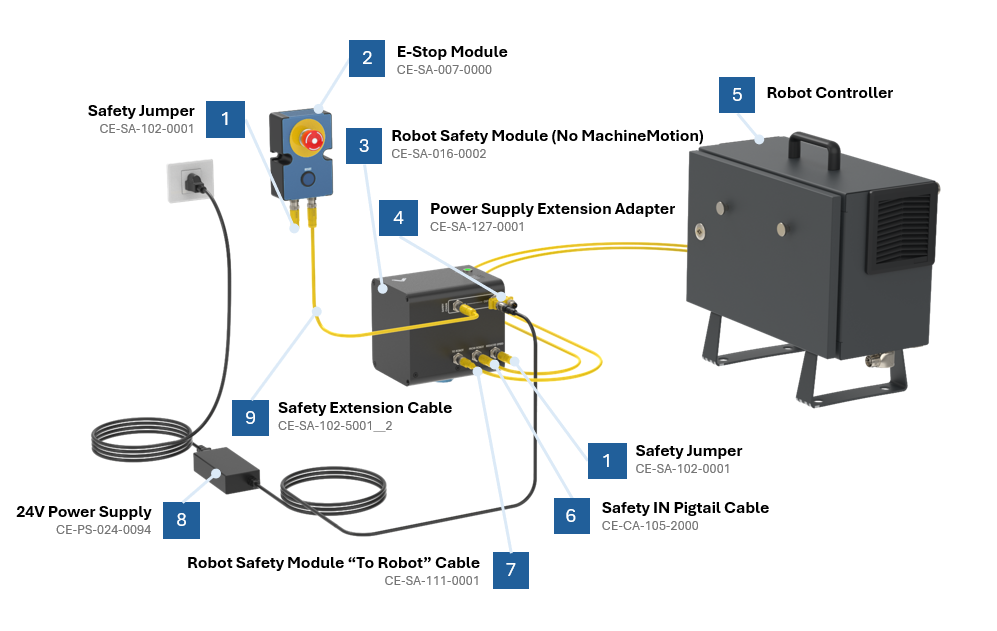 Figure 7: Robot Safety Module without MachineMotion |
*Note: Insert a jumper on any unused safety input for proper functionality. See table below to identify the appropriate jumper part number (included with the module).
Jumper Part Number | Description | Target module | Port restrictions |
|---|---|---|---|
CE-SA-125-0001 | M12, male, 12 pins, black jumper | Muting Safety Module AI (CE-SA-015-0001__2) | Strictly reserved for Device ports |
CE-JP-000-0002 | M12, male, 4 pins, yellow jumper | Access Request Module AI (CE-SA-017-0001__2) | Strictly reserved for End Effector port |
CE-SA-102-0001 | M12, male, 12 pins, yellow jumper | All modules | Other unused safety input ports |
Robot Wiring & Configuration
The Robot Safety Module (No MachineMotion) is supplied thanks to and external class 2 power supply (CE-PS-024-0094). The adapter CE-SA-127-0001 is used to supply the Robot Safety Module while enabling a 3rd connection to the Fanuc Controller.
.png)
Figure 8: Robot Safety Module with Fanuc R-30iB Mini plus controller wiring diagram
For other robot brands, please, contact our technical support.
Important information
Shorting or overloading the reduced port could trip the electronic fuse. To reset the fuse, a power cycle is needed.
No emergency stop button should be placed on the reduced port.
Safety Data
The Robot Safety Module realizes the following safety functions :
System emergency stop output at the Safety OUT port from the Safety IN port (Estop_SafetyIN-to-SafetyOUT);
System emergency stop output at the To Robot port from the Safety IN port (Estop_SafetyIN-to-Robot);
System emergency stop output at the Safety OUT port from the From Robot port (Estop_FromRobot);
Redundant safe signal at the From Robot port from the Reduced port (Reduced_FromRobot);
System reset propagation from the Safety IN port to the Safety OUT port (Reset_SafetyOUT); and
System reset propagation from the Safety IN port to the To Robot port (Reset_ToRobot).
For each of these functions, safety data can be found in the following table.
Safety Function | PL | Cat. | MTTFd | DCavg | PFHd | Response time |
|---|---|---|---|---|---|---|
E-stop_SafetyIN-to-SafetyOUT | e | 3 | 224 | 99% | 4.29E-08 | 20 ms |
Estop_SafetyIN-to-Robot | e | 3 | 186 | 99% | 4.29E-08 | 30 ms |
Estop_FromRobot | e | 3 | 224 | 99% | 4.29E-08 | 20 ms |
Reduced_FromRobot | e | 3 | 186 | 99% | 4.29E-08 | 20 ms |
Reset_SafetyOUT | c | 1 | >100 | N/A | 1.14E-06 | Not applicable |
Reset_ToRobot | c | 1 | >100 | N/A | 1.14E-06 | Not applicable |
The above information have been calculated based on the following operation conditions:
Data | Value | Unit |
|---|---|---|
dop | 365 | days/years |
hop | 24 | hours/days |
tcycle | 8640 | s/cycle |
If the robot is placed in reduced (collaborative mode) with a cycle time of less than 500s, the performance level may drop to PL d.